Efectuador Final de Robot Industrial/Mano Robótica Hábil
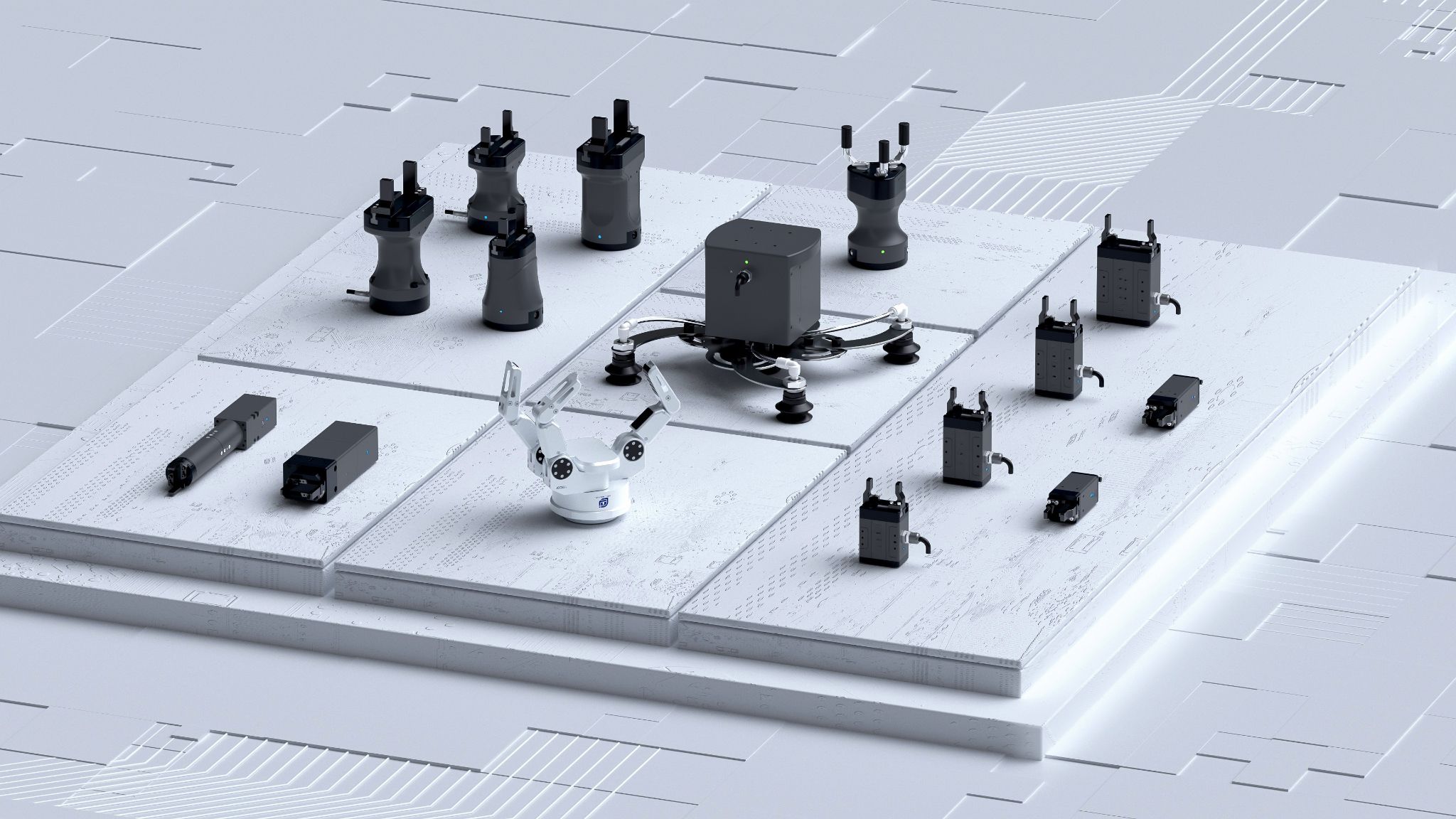
El efector final eléctrico es un componente clave al final de un robot industrial, utilizado para realizar operaciones precisas como sujeción, agarre, adsorción, manipulación y ensamblaje. Logra una respuesta de alta velocidad y un control de alta precisión mediante accionamiento eléctrico, reemplazando los métodos neumáticos o hidráulicos tradicionales, y se utiliza ampliamente en la fabricación 3C, el ensamblaje de automóviles, la producción de baterías de energía nueva y otros campos. En comparación con los actuadores tradicionales, sus tecnologías centrales incluyen accionamiento por servomotor, detección inteligente y diseño modular para satisfacer las necesidades de producción flexible. Los efectores finales eléctricos se pueden dividir en pinzas eléctricas, ventosas eléctricas, manos diestras de robot y microcilindros eléctricos según sus formas y escenarios de aplicación.
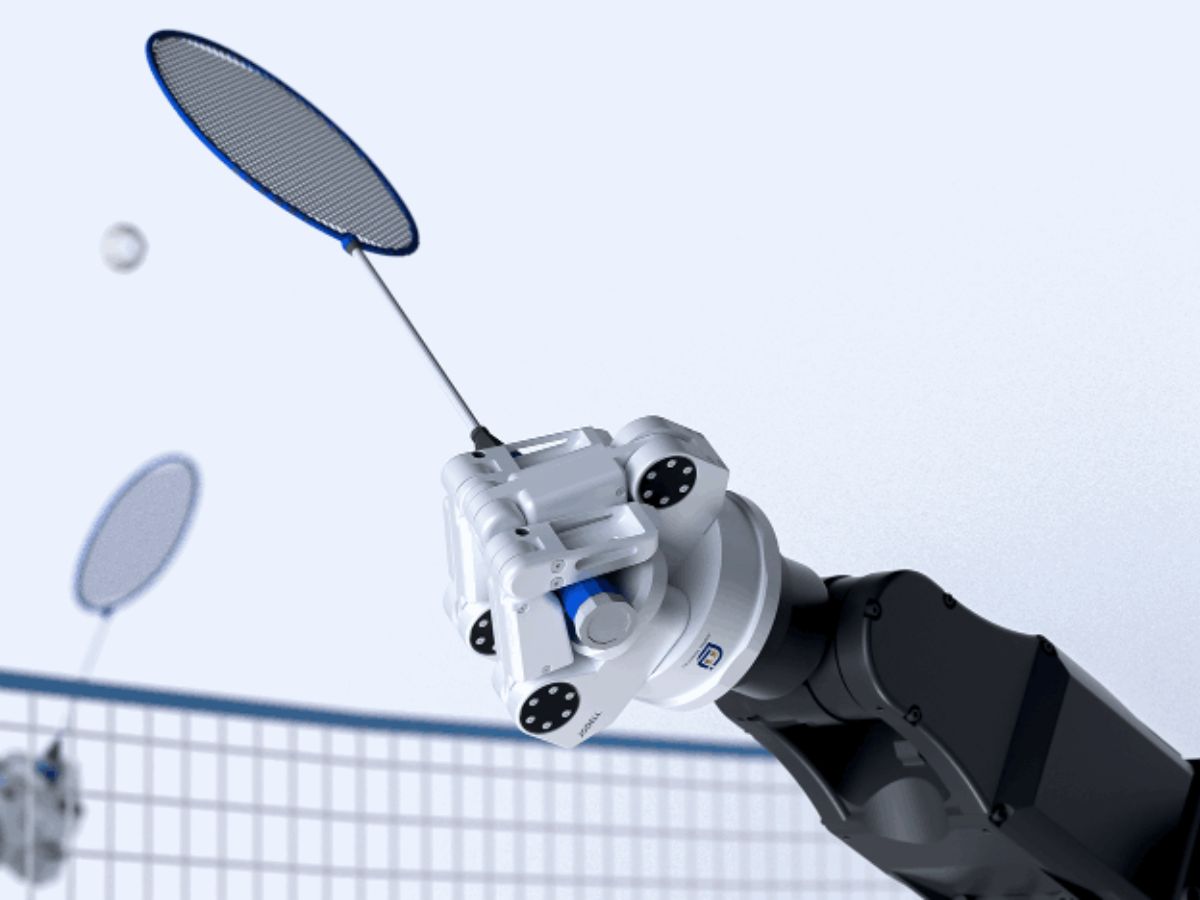
Mano de robot diestra
 Guante Exoesquelético Mecánico de Teleoperación de Alta PrecisiónEl guante exoesquelético mecánico Honpine EG es un producto dedicado a la captura de movimiento de la mano de alta precisión y al control auxiliar. Equipado con tecnología central de codificador magnético, el guante no solo ofrece alta precisión en la detección del ángulo de las articulaciones de la mano, sino que también elimina la deriva de posición. Además, al integrar la tecnología de transmisión inalámbrica ESP-NOW con un algoritmo de calibración de mapeo dinámico, permite la teleoperación de alta precisión de manos diestras. Actualmente, el producto es ampliamente aplicable en fabricación industrial, rehabilitación médica, investigación científica y otros campos, satisfaciendo las necesidades prácticas de aplicación en diversos escenarios.Detalles
Guante Exoesquelético Mecánico de Teleoperación de Alta PrecisiónEl guante exoesquelético mecánico Honpine EG es un producto dedicado a la captura de movimiento de la mano de alta precisión y al control auxiliar. Equipado con tecnología central de codificador magnético, el guante no solo ofrece alta precisión en la detección del ángulo de las articulaciones de la mano, sino que también elimina la deriva de posición. Además, al integrar la tecnología de transmisión inalámbrica ESP-NOW con un algoritmo de calibración de mapeo dinámico, permite la teleoperación de alta precisión de manos diestras. Actualmente, el producto es ampliamente aplicable en fabricación industrial, rehabilitación médica, investigación científica y otros campos, satisfaciendo las necesidades prácticas de aplicación en diversos escenarios.Detalles Guante de Teleoperación Robótica Inteligente para Operaciones Remotas de VR/AREl Guante de Teleoperación HONPINE es un dispositivo de captura de movimiento de mano de alta precisión diseñado para aplicaciones de robótica inteligente y control remoto. Basado en tecnología avanzada de captura de movimiento y el algoritmo de mapeo dinámico desarrollado independientemente por la empresa, el guante permite un control preciso de manos diestras. Al capturar y transmitir los movimientos de la mano en tiempo real, los usuarios pueden operar manos robóticas de manera natural e intuitiva, satisfaciendo las necesidades de diversos escenarios de aplicación, como operaciones remotas, realidad virtual (VR), realidad aumentada (AR) y fabricación inteligente.Detalles
Guante de Teleoperación Robótica Inteligente para Operaciones Remotas de VR/AREl Guante de Teleoperación HONPINE es un dispositivo de captura de movimiento de mano de alta precisión diseñado para aplicaciones de robótica inteligente y control remoto. Basado en tecnología avanzada de captura de movimiento y el algoritmo de mapeo dinámico desarrollado independientemente por la empresa, el guante permite un control preciso de manos diestras. Al capturar y transmitir los movimientos de la mano en tiempo real, los usuarios pueden operar manos robóticas de manera natural e intuitiva, satisfaciendo las necesidades de diversos escenarios de aplicación, como operaciones remotas, realidad virtual (VR), realidad aumentada (AR) y fabricación inteligente.Detalles- Control de Alta Precisión Mano Humana Industrial Diestra de 21 GDLHONPINE L30 es una mano diestra de 21 GDL que replica con precisión los movimientos finos de la mano humana con una precisión de operación a nivel de milímetro. Adopta sistemas de transmisión por tendones avanzados y mecatrónicos altamente integrados para movimientos estables y control preciso, y admite percepción multimodal (fuerza, tacto, visión) para mejorar la percepción en tiempo real y la confiabilidad de interacción. Con alto número de GDL, percepción multimodal y algoritmos líderes de control de movimiento, se utiliza ampliamente en automatización industrial, asistencia médica e investigación experimental, ofreciendo una solución de efector final altamente adaptable y confiable.Detalles
- Mano diestra de agarre natural humano de 21 grados de libertad de alta precisiónHONPINE L20 es una mano diestra de 21 grados de libertad que simula con precisión el agarre natural de la mano humana con operaciones delicadas. Adopta transmisión por enlaces innovadora y motores de desarrollo propio para movimientos de alta precisión, y admite sensores de fuerza, visión y táctiles, mejorando la adaptabilidad ambiental y la interacción inteligente mediante percepción multimodal. Con altos grados de libertad, percepción multimodal y algoritmos híbridos de fuerza-posición, se utiliza ampliamente en educación e investigación, automatización industrial, asistencia doméstica y cuidado de ancianos, proporcionando soluciones de operación precisas y diestras.Detalles
- Mano Biónica Hábil de Robot de Control Preciso de Alto RendimientoLa mano robótica HONPINE L10 es una mano diestra de alto rendimiento con 20 grados de libertad (DoFs). Equipada con motores de desarrollo propio y mecanismos de transmisión por enlaces, garantiza estabilidad en la tracción mientras permite un control preciso y movimientos fluidos. Ampliamente utilizada en educación e investigación, interpretación de piano, asistencia doméstica y cuidado de ancianos, impulsa el avance y la implementación de robots inteligentes y la colaboración humano-robot. Admite percepción ambiental multimodal mediante diversos sensores y es compatible con entornos ROS/QT (incluye plugins ROS estándar para desarrollo secundario).Detalles
 Mano diestra de alto rendimiento con 17 grados de libertad para sistemas robóticosLa mano robótica HONPINE 07 es una mano diestra de alto rendimiento con 17 grados de libertad. Impulsada por motores de desarrollo propio, equilibra el control de costes con un rendimiento fiable de agarre y operación, satisfaciendo diversas necesidades de aplicación. Proporciona plugins ROS para desarrollo secundario, siendo adecuada para educación e investigación, agarre auxiliar e interacción inteligente, ofreciendo una solución eficiente y económica de mano diestra para sistemas robóticos.Detalles
Mano diestra de alto rendimiento con 17 grados de libertad para sistemas robóticosLa mano robótica HONPINE 07 es una mano diestra de alto rendimiento con 17 grados de libertad. Impulsada por motores de desarrollo propio, equilibra el control de costes con un rendimiento fiable de agarre y operación, satisfaciendo diversas necesidades de aplicación. Proporciona plugins ROS para desarrollo secundario, siendo adecuada para educación e investigación, agarre auxiliar e interacción inteligente, ofreciendo una solución eficiente y económica de mano diestra para sistemas robóticos.Detalles- Mano Biónica Diestra de Alta Precisión Compacta con Fuerza de Agarre ElevadaLa mano biónica diestra HONPINE O6 cuenta con 6 articulaciones activas y 5 pasivas. Ofrece una fuerza de agarre elevada, control preciso de fuerza, tamaño compacto y diseño ligero. Es especialmente adecuada para aplicaciones como manipulación logística, ensamblaje industrial y agarre de objetos de forma irregular.Detalles
- Mano Robótica Diestra con Diseño de Articulación de Dedos HumanoideLa mano robótica diestra es un efector final de robot que imita en gran medida la mano humana. Adopta un diseño antropomórfico de cinco dedos y simula el movimiento articular de la mano humana a través de más de 15 grados de libertad para realizar operaciones finas como agarrar y pellizcar. Es el componente central del robot para realizar tareas complejas. Pertenece al tipo de pinza en el efector final del robot. A diferencia de la pinza tradicional de dos dedos, tiene capacidades de percepción multimodal y control inteligente, puede adaptarse a objetos irregulares y completar tareas de operación de precisión.Detalles








Pinza eléctrica
 Guante Exoesquelético Mecánico de Teleoperación de Alta PrecisiónEl guante exoesquelético mecánico Honpine EG es un producto dedicado a la captura de movimiento de la mano de alta precisión y al control auxiliar. Equipado con tecnología central de codificador magnético, el guante no solo ofrece alta precisión en la detección del ángulo de las articulaciones de la mano, sino que también elimina la deriva de posición. Además, al integrar la tecnología de transmisión inalámbrica ESP-NOW con un algoritmo de calibración de mapeo dinámico, permite la teleoperación de alta precisión de manos diestras. Actualmente, el producto es ampliamente aplicable en fabricación industrial, rehabilitación médica, investigación científica y otros campos, satisfaciendo las necesidades prácticas de aplicación en diversos escenarios.Detalles
Guante Exoesquelético Mecánico de Teleoperación de Alta PrecisiónEl guante exoesquelético mecánico Honpine EG es un producto dedicado a la captura de movimiento de la mano de alta precisión y al control auxiliar. Equipado con tecnología central de codificador magnético, el guante no solo ofrece alta precisión en la detección del ángulo de las articulaciones de la mano, sino que también elimina la deriva de posición. Además, al integrar la tecnología de transmisión inalámbrica ESP-NOW con un algoritmo de calibración de mapeo dinámico, permite la teleoperación de alta precisión de manos diestras. Actualmente, el producto es ampliamente aplicable en fabricación industrial, rehabilitación médica, investigación científica y otros campos, satisfaciendo las necesidades prácticas de aplicación en diversos escenarios.Detalles Guante de Teleoperación Robótica Inteligente para Operaciones Remotas de VR/AREl Guante de Teleoperación HONPINE es un dispositivo de captura de movimiento de mano de alta precisión diseñado para aplicaciones de robótica inteligente y control remoto. Basado en tecnología avanzada de captura de movimiento y el algoritmo de mapeo dinámico desarrollado independientemente por la empresa, el guante permite un control preciso de manos diestras. Al capturar y transmitir los movimientos de la mano en tiempo real, los usuarios pueden operar manos robóticas de manera natural e intuitiva, satisfaciendo las necesidades de diversos escenarios de aplicación, como operaciones remotas, realidad virtual (VR), realidad aumentada (AR) y fabricación inteligente.Detalles
Guante de Teleoperación Robótica Inteligente para Operaciones Remotas de VR/AREl Guante de Teleoperación HONPINE es un dispositivo de captura de movimiento de mano de alta precisión diseñado para aplicaciones de robótica inteligente y control remoto. Basado en tecnología avanzada de captura de movimiento y el algoritmo de mapeo dinámico desarrollado independientemente por la empresa, el guante permite un control preciso de manos diestras. Al capturar y transmitir los movimientos de la mano en tiempo real, los usuarios pueden operar manos robóticas de manera natural e intuitiva, satisfaciendo las necesidades de diversos escenarios de aplicación, como operaciones remotas, realidad virtual (VR), realidad aumentada (AR) y fabricación inteligente.Detalles Control de Alta Precisión Mano Humana Industrial Diestra de 21 GDLHONPINE L30 es una mano diestra de 21 GDL que replica con precisión los movimientos finos de la mano humana con una precisión de operación a nivel de milímetro. Adopta sistemas de transmisión por tendones avanzados y mecatrónicos altamente integrados para movimientos estables y control preciso, y admite percepción multimodal (fuerza, tacto, visión) para mejorar la percepción en tiempo real y la confiabilidad de interacción. Con alto número de GDL, percepción multimodal y algoritmos líderes de control de movimiento, se utiliza ampliamente en automatización industrial, asistencia médica e investigación experimental, ofreciendo una solución de efector final altamente adaptable y confiable.Detalles
Control de Alta Precisión Mano Humana Industrial Diestra de 21 GDLHONPINE L30 es una mano diestra de 21 GDL que replica con precisión los movimientos finos de la mano humana con una precisión de operación a nivel de milímetro. Adopta sistemas de transmisión por tendones avanzados y mecatrónicos altamente integrados para movimientos estables y control preciso, y admite percepción multimodal (fuerza, tacto, visión) para mejorar la percepción en tiempo real y la confiabilidad de interacción. Con alto número de GDL, percepción multimodal y algoritmos líderes de control de movimiento, se utiliza ampliamente en automatización industrial, asistencia médica e investigación experimental, ofreciendo una solución de efector final altamente adaptable y confiable.Detalles Mano diestra de agarre natural humano de 21 grados de libertad de alta precisiónHONPINE L20 es una mano diestra de 21 grados de libertad que simula con precisión el agarre natural de la mano humana con operaciones delicadas. Adopta transmisión por enlaces innovadora y motores de desarrollo propio para movimientos de alta precisión, y admite sensores de fuerza, visión y táctiles, mejorando la adaptabilidad ambiental y la interacción inteligente mediante percepción multimodal. Con altos grados de libertad, percepción multimodal y algoritmos híbridos de fuerza-posición, se utiliza ampliamente en educación e investigación, automatización industrial, asistencia doméstica y cuidado de ancianos, proporcionando soluciones de operación precisas y diestras.Detalles
Mano diestra de agarre natural humano de 21 grados de libertad de alta precisiónHONPINE L20 es una mano diestra de 21 grados de libertad que simula con precisión el agarre natural de la mano humana con operaciones delicadas. Adopta transmisión por enlaces innovadora y motores de desarrollo propio para movimientos de alta precisión, y admite sensores de fuerza, visión y táctiles, mejorando la adaptabilidad ambiental y la interacción inteligente mediante percepción multimodal. Con altos grados de libertad, percepción multimodal y algoritmos híbridos de fuerza-posición, se utiliza ampliamente en educación e investigación, automatización industrial, asistencia doméstica y cuidado de ancianos, proporcionando soluciones de operación precisas y diestras.Detalles Mano Biónica Hábil de Robot de Control Preciso de Alto RendimientoLa mano robótica HONPINE L10 es una mano diestra de alto rendimiento con 20 grados de libertad (DoFs). Equipada con motores de desarrollo propio y mecanismos de transmisión por enlaces, garantiza estabilidad en la tracción mientras permite un control preciso y movimientos fluidos. Ampliamente utilizada en educación e investigación, interpretación de piano, asistencia doméstica y cuidado de ancianos, impulsa el avance y la implementación de robots inteligentes y la colaboración humano-robot. Admite percepción ambiental multimodal mediante diversos sensores y es compatible con entornos ROS/QT (incluye plugins ROS estándar para desarrollo secundario).Detalles
Mano Biónica Hábil de Robot de Control Preciso de Alto RendimientoLa mano robótica HONPINE L10 es una mano diestra de alto rendimiento con 20 grados de libertad (DoFs). Equipada con motores de desarrollo propio y mecanismos de transmisión por enlaces, garantiza estabilidad en la tracción mientras permite un control preciso y movimientos fluidos. Ampliamente utilizada en educación e investigación, interpretación de piano, asistencia doméstica y cuidado de ancianos, impulsa el avance y la implementación de robots inteligentes y la colaboración humano-robot. Admite percepción ambiental multimodal mediante diversos sensores y es compatible con entornos ROS/QT (incluye plugins ROS estándar para desarrollo secundario).Detalles Mano diestra de alto rendimiento con 17 grados de libertad para sistemas robóticosLa mano robótica HONPINE 07 es una mano diestra de alto rendimiento con 17 grados de libertad. Impulsada por motores de desarrollo propio, equilibra el control de costes con un rendimiento fiable de agarre y operación, satisfaciendo diversas necesidades de aplicación. Proporciona plugins ROS para desarrollo secundario, siendo adecuada para educación e investigación, agarre auxiliar e interacción inteligente, ofreciendo una solución eficiente y económica de mano diestra para sistemas robóticos.Detalles
Mano diestra de alto rendimiento con 17 grados de libertad para sistemas robóticosLa mano robótica HONPINE 07 es una mano diestra de alto rendimiento con 17 grados de libertad. Impulsada por motores de desarrollo propio, equilibra el control de costes con un rendimiento fiable de agarre y operación, satisfaciendo diversas necesidades de aplicación. Proporciona plugins ROS para desarrollo secundario, siendo adecuada para educación e investigación, agarre auxiliar e interacción inteligente, ofreciendo una solución eficiente y económica de mano diestra para sistemas robóticos.Detalles Mano Biónica Diestra de Alta Precisión Compacta con Fuerza de Agarre ElevadaLa mano biónica diestra HONPINE O6 cuenta con 6 articulaciones activas y 5 pasivas. Ofrece una fuerza de agarre elevada, control preciso de fuerza, tamaño compacto y diseño ligero. Es especialmente adecuada para aplicaciones como manipulación logística, ensamblaje industrial y agarre de objetos de forma irregular.Detalles
Mano Biónica Diestra de Alta Precisión Compacta con Fuerza de Agarre ElevadaLa mano biónica diestra HONPINE O6 cuenta con 6 articulaciones activas y 5 pasivas. Ofrece una fuerza de agarre elevada, control preciso de fuerza, tamaño compacto y diseño ligero. Es especialmente adecuada para aplicaciones como manipulación logística, ensamblaje industrial y agarre de objetos de forma irregular.Detalles Mano Robótica Diestra con Diseño de Articulación de Dedos HumanoideLa mano robótica diestra es un efector final de robot que imita en gran medida la mano humana. Adopta un diseño antropomórfico de cinco dedos y simula el movimiento articular de la mano humana a través de más de 15 grados de libertad para realizar operaciones finas como agarrar y pellizcar. Es el componente central del robot para realizar tareas complejas. Pertenece al tipo de pinza en el efector final del robot. A diferencia de la pinza tradicional de dos dedos, tiene capacidades de percepción multimodal y control inteligente, puede adaptarse a objetos irregulares y completar tareas de operación de precisión.Detalles
Mano Robótica Diestra con Diseño de Articulación de Dedos HumanoideLa mano robótica diestra es un efector final de robot que imita en gran medida la mano humana. Adopta un diseño antropomórfico de cinco dedos y simula el movimiento articular de la mano humana a través de más de 15 grados de libertad para realizar operaciones finas como agarrar y pellizcar. Es el componente central del robot para realizar tareas complejas. Pertenece al tipo de pinza en el efector final del robot. A diferencia de la pinza tradicional de dos dedos, tiene capacidades de percepción multimodal y control inteligente, puede adaptarse a objetos irregulares y completar tareas de operación de precisión.Detalles
Cilindro Eléctrico Micro


Aplicación del Efectuador Final de Robot
El efectuador final de robot ofrece nueve series que incluyen manos industriales hábiles, pinzas eléctricas inteligentes,ventosas eléctricas y modelos multifuncionales para automatización médica, baterías de litio, 3C, semiconductores yindustrias alimentarias. Compactos en diseño, nuestros actuadores garantizan alta precisión, alta rigidez y carrera
ultralarga con control de fuerza preciso. Son compatibles con aplicaciones en red, fáciles de instalar y simples deoperar, proporcionando soluciones de automatización seguras y eficientes para diversas necesidades de producción.
El efectuador final de robot ofrece nueve series que incluyen manos industriales hábiles, pinzas eléctricas inteligentes,ventosas eléctricas y modelos multifuncionales para automatización médica, baterías de litio, 3C, semiconductores yindustrias alimentarias. Compactos en diseño, nuestros actuadores garantizan alta precisión, alta rigidez y carrera
ultralarga con control de fuerza preciso. Son compatibles con aplicaciones en red, fáciles de instalar y simples deoperar, proporcionando soluciones de automatización seguras y eficientes para diversas necesidades de producción.
‹


›

- 00
0000-00
¿Qué es un actuador de articulación robótica?¿Cómo elegir el mejor actuador rotativo para articulaciones robóticas?
- 00
0000-00
Wiki de Tecnología de Transmisión de Accionamiento Armónico
- 00
0000-00
El actuador rotatorio armónico ayuda a implementar la primera estación de carga móvil aérea inteligente para vehículos eléctricos de CC con cambio de vía del mundo
- 00
0000-00
Accionamiento Armónico Ultracompacto – Fabricación de Precisión con Materiales de Alta Gama
- 00
0000-00
El secreto detrás de la ultra alta calidad de los reductores planetarios de alta precisión HONPINE





