
Efectuador Final de Robot Industrial/Mano Robótica Hábil
Mano de robot diestra
 Guante Exoesquelético Mecánico de Teleoperación de Alta PrecisiónEl guante exoesquelético mecánico Honpine EG es un producto dedicado a la captura de movimiento de la mano de alta precisión y al control auxiliar. Equipado con tecnología central de codificador magnético, el guante no solo ofrece alta precisión en la detección del ángulo de las articulaciones de la mano, sino que también elimina la deriva de posición. Además, al integrar la tecnología de transmisión inalámbrica ESP-NOW con un algoritmo de calibración de mapeo dinámico, permite la teleoperación de alta precisión de manos diestras. Actualmente, el producto es ampliamente aplicable en fabricación industrial, rehabilitación médica, investigación científica y otros campos, satisfaciendo las necesidades prácticas de aplicación en diversos escenarios.Detalles
Guante Exoesquelético Mecánico de Teleoperación de Alta PrecisiónEl guante exoesquelético mecánico Honpine EG es un producto dedicado a la captura de movimiento de la mano de alta precisión y al control auxiliar. Equipado con tecnología central de codificador magnético, el guante no solo ofrece alta precisión en la detección del ángulo de las articulaciones de la mano, sino que también elimina la deriva de posición. Además, al integrar la tecnología de transmisión inalámbrica ESP-NOW con un algoritmo de calibración de mapeo dinámico, permite la teleoperación de alta precisión de manos diestras. Actualmente, el producto es ampliamente aplicable en fabricación industrial, rehabilitación médica, investigación científica y otros campos, satisfaciendo las necesidades prácticas de aplicación en diversos escenarios.Detalles Guante de Teleoperación Robótica Inteligente para Operaciones Remotas de VR/AREl Guante de Teleoperación HONPINE es un dispositivo de captura de movimiento de mano de alta precisión diseñado para aplicaciones de robótica inteligente y control remoto. Basado en tecnología avanzada de captura de movimiento y el algoritmo de mapeo dinámico desarrollado independientemente por la empresa, el guante permite un control preciso de manos diestras. Al capturar y transmitir los movimientos de la mano en tiempo real, los usuarios pueden operar manos robóticas de manera natural e intuitiva, satisfaciendo las necesidades de diversos escenarios de aplicación, como operaciones remotas, realidad virtual (VR), realidad aumentada (AR) y fabricación inteligente.Detalles
Guante de Teleoperación Robótica Inteligente para Operaciones Remotas de VR/AREl Guante de Teleoperación HONPINE es un dispositivo de captura de movimiento de mano de alta precisión diseñado para aplicaciones de robótica inteligente y control remoto. Basado en tecnología avanzada de captura de movimiento y el algoritmo de mapeo dinámico desarrollado independientemente por la empresa, el guante permite un control preciso de manos diestras. Al capturar y transmitir los movimientos de la mano en tiempo real, los usuarios pueden operar manos robóticas de manera natural e intuitiva, satisfaciendo las necesidades de diversos escenarios de aplicación, como operaciones remotas, realidad virtual (VR), realidad aumentada (AR) y fabricación inteligente.Detalles- Control de Alta Precisión Mano Humana Industrial Diestra de 21 GDLHONPINE L30 es una mano diestra de 21 GDL que replica con precisión los movimientos finos de la mano humana con una precisión de operación a nivel de milímetro. Adopta sistemas de transmisión por tendones avanzados y mecatrónicos altamente integrados para movimientos estables y control preciso, y admite percepción multimodal (fuerza, tacto, visión) para mejorar la percepción en tiempo real y la confiabilidad de interacción. Con alto número de GDL, percepción multimodal y algoritmos líderes de control de movimiento, se utiliza ampliamente en automatización industrial, asistencia médica e investigación experimental, ofreciendo una solución de efector final altamente adaptable y confiable.Detalles
- Mano diestra de agarre natural humano de 21 grados de libertad de alta precisiónHONPINE L20 es una mano diestra de 21 grados de libertad que simula con precisión el agarre natural de la mano humana con operaciones delicadas. Adopta transmisión por enlaces innovadora y motores de desarrollo propio para movimientos de alta precisión, y admite sensores de fuerza, visión y táctiles, mejorando la adaptabilidad ambiental y la interacción inteligente mediante percepción multimodal. Con altos grados de libertad, percepción multimodal y algoritmos híbridos de fuerza-posición, se utiliza ampliamente en educación e investigación, automatización industrial, asistencia doméstica y cuidado de ancianos, proporcionando soluciones de operación precisas y diestras.Detalles
- Mano Biónica Hábil de Robot de Control Preciso de Alto RendimientoLa mano robótica HONPINE L10 es una mano diestra de alto rendimiento con 20 grados de libertad (DoFs). Equipada con motores de desarrollo propio y mecanismos de transmisión por enlaces, garantiza estabilidad en la tracción mientras permite un control preciso y movimientos fluidos. Ampliamente utilizada en educación e investigación, interpretación de piano, asistencia doméstica y cuidado de ancianos, impulsa el avance y la implementación de robots inteligentes y la colaboración humano-robot. Admite percepción ambiental multimodal mediante diversos sensores y es compatible con entornos ROS/QT (incluye plugins ROS estándar para desarrollo secundario).Detalles
 Mano diestra de alto rendimiento con 17 grados de libertad para sistemas robóticosLa mano robótica HONPINE 07 es una mano diestra de alto rendimiento con 17 grados de libertad. Impulsada por motores de desarrollo propio, equilibra el control de costes con un rendimiento fiable de agarre y operación, satisfaciendo diversas necesidades de aplicación. Proporciona plugins ROS para desarrollo secundario, siendo adecuada para educación e investigación, agarre auxiliar e interacción inteligente, ofreciendo una solución eficiente y económica de mano diestra para sistemas robóticos.Detalles
Mano diestra de alto rendimiento con 17 grados de libertad para sistemas robóticosLa mano robótica HONPINE 07 es una mano diestra de alto rendimiento con 17 grados de libertad. Impulsada por motores de desarrollo propio, equilibra el control de costes con un rendimiento fiable de agarre y operación, satisfaciendo diversas necesidades de aplicación. Proporciona plugins ROS para desarrollo secundario, siendo adecuada para educación e investigación, agarre auxiliar e interacción inteligente, ofreciendo una solución eficiente y económica de mano diestra para sistemas robóticos.Detalles- Mano Biónica Diestra de Alta Precisión Compacta con Fuerza de Agarre ElevadaLa mano biónica diestra HONPINE O6 cuenta con 6 articulaciones activas y 5 pasivas. Ofrece una fuerza de agarre elevada, control preciso de fuerza, tamaño compacto y diseño ligero. Es especialmente adecuada para aplicaciones como manipulación logística, ensamblaje industrial y agarre de objetos de forma irregular.Detalles
- Mano Robótica Diestra con Diseño de Articulación de Dedos HumanoideLa mano robótica diestra es un efector final de robot que imita en gran medida la mano humana. Adopta un diseño antropomórfico de cinco dedos y simula el movimiento articular de la mano humana a través de más de 15 grados de libertad para realizar operaciones finas como agarrar y pellizcar. Es el componente central del robot para realizar tareas complejas. Pertenece al tipo de pinza en el efector final del robot. A diferencia de la pinza tradicional de dos dedos, tiene capacidades de percepción multimodal y control inteligente, puede adaptarse a objetos irregulares y completar tareas de operación de precisión.Detalles








Pinza eléctrica
 Pinzas eléctricas de pesaje para la industria alimentaria de la serie HONPINE WEPGLa serie de pinzas eléctricas de pesaje HONPINE WEPG incluye actualmente los modelos WEPG01, WEPG05, WEPG-T08 y WEPG-T15, que cubren cargas útiles máximas de 1 kg, 5 kg, 8 kg y 15 kg respectivamente. Esta gama satisface plenamente los requisitos de peso de la producción de baterías de litio y cubre la mayoría de las aplicaciones industriales de pesaje.
Pinzas eléctricas de pesaje para la industria alimentaria de la serie HONPINE WEPGLa serie de pinzas eléctricas de pesaje HONPINE WEPG incluye actualmente los modelos WEPG01, WEPG05, WEPG-T08 y WEPG-T15, que cubren cargas útiles máximas de 1 kg, 5 kg, 8 kg y 15 kg respectivamente. Esta gama satisface plenamente los requisitos de peso de la producción de baterías de litio y cubre la mayoría de las aplicaciones industriales de pesaje.
Además de su amplia adopción en líneas de fabricación de baterías de litio, la serie WEPG también se ha implementado con éxito en las industrias automotriz, farmacéutica y de procesamiento de alimentos, con clientes de referencia en múltiples sectores. La serie también admite soluciones personalizadas para aplicaciones de pesaje en múltiples escenarios.Detalles Pinzas paralelas eléctricas HONPINE serie EPG-FLEX para fabricación de precisiónCon el auge de la fabricación flexible de lotes pequeños y múltiples variedades, la reconfiguración rápida de los equipos de automatización se ha vuelto esencial. Las pinzas eléctricas tradicionales de diseño fijo suelen tener dificultades para adaptarse a los cambios frecuentes en los procesos de producción y los escenarios de aplicación.
Pinzas paralelas eléctricas HONPINE serie EPG-FLEX para fabricación de precisiónCon el auge de la fabricación flexible de lotes pequeños y múltiples variedades, la reconfiguración rápida de los equipos de automatización se ha vuelto esencial. Las pinzas eléctricas tradicionales de diseño fijo suelen tener dificultades para adaptarse a los cambios frecuentes en los procesos de producción y los escenarios de aplicación.
Las pinzas paralelas eléctricas de la serie HONPINE EPG-FLEX están diseñadas para responder a esta demanda, basándose en un concepto de estandarización modular y configuración flexible. Como una actualización avanzada dentro de la cartera de pinzas eléctricas de HONPINE, la serie EPG-FLEX ofrece una solución más adaptable para entornos complejos de automatización industrial.
La serie ha demostrado un sólido rendimiento en aplicaciones como el ensamblaje de componentes de múltiples tipos en la industria electrónica 3C, el cambio entre múltiples estaciones en líneas de producción de nuevas energías y la manipulación auxiliar de materiales en la fabricación de semiconductores.Detalles Pinza paralela eléctrica para automatización industrial para sustituir fácilmente las pinzas neumáticasLas pinzas paralelas eléctricas HONPINE Serie EPG-ST están diseñadas como un reemplazo rentable de las pinzas neumáticas tradicionales en aplicaciones de recogida y colocación y manipulación de materiales. Con un motor, un accionamiento y un controlador integrados, permiten la sustitución directa de pinzas neumáticas del mismo tamaño sin modificar las líneas de producción existentes. En comparación con las soluciones neumáticas, la Serie EPG-ST reduce el consumo de aire comprimido, simplifica la instalación y el funcionamiento, y ofrece mayor control y fiabilidad. Probada en aplicaciones como el ensamblaje de electrónica 3C, la manipulación de baterías de nueva energía y los laboratorios de ciencias de la vida, la Serie EPG-ST ofrece una solución eficiente y fácil de usar para acelerar la transición de la automatización neumática a la eléctrica.Detalles
Pinza paralela eléctrica para automatización industrial para sustituir fácilmente las pinzas neumáticasLas pinzas paralelas eléctricas HONPINE Serie EPG-ST están diseñadas como un reemplazo rentable de las pinzas neumáticas tradicionales en aplicaciones de recogida y colocación y manipulación de materiales. Con un motor, un accionamiento y un controlador integrados, permiten la sustitución directa de pinzas neumáticas del mismo tamaño sin modificar las líneas de producción existentes. En comparación con las soluciones neumáticas, la Serie EPG-ST reduce el consumo de aire comprimido, simplifica la instalación y el funcionamiento, y ofrece mayor control y fiabilidad. Probada en aplicaciones como el ensamblaje de electrónica 3C, la manipulación de baterías de nueva energía y los laboratorios de ciencias de la vida, la Serie EPG-ST ofrece una solución eficiente y fácil de usar para acelerar la transición de la automatización neumática a la eléctrica.Detalles Actuador Rotatorio Lineal ZR de Alta PrecisiónEl actuador rotatorio lineal (también conocido como actuador ZR) es un módulo de movimiento bidimensional altamente integrado que combina funciones de elevación lineal (eje Z) y rotación de 360° (eje R). Utiliza un motor lineal para movimiento lineal preciso y un servomotor para accionar el movimiento rotacional. Al combinar ambos ejes, puede realizar acciones compuestas sincronizadas como elevación, rotación y calibración angular. Es ideal para aplicaciones de alta precisión como colocación de chips semiconductores y ensamblaje de precisión.Detalles
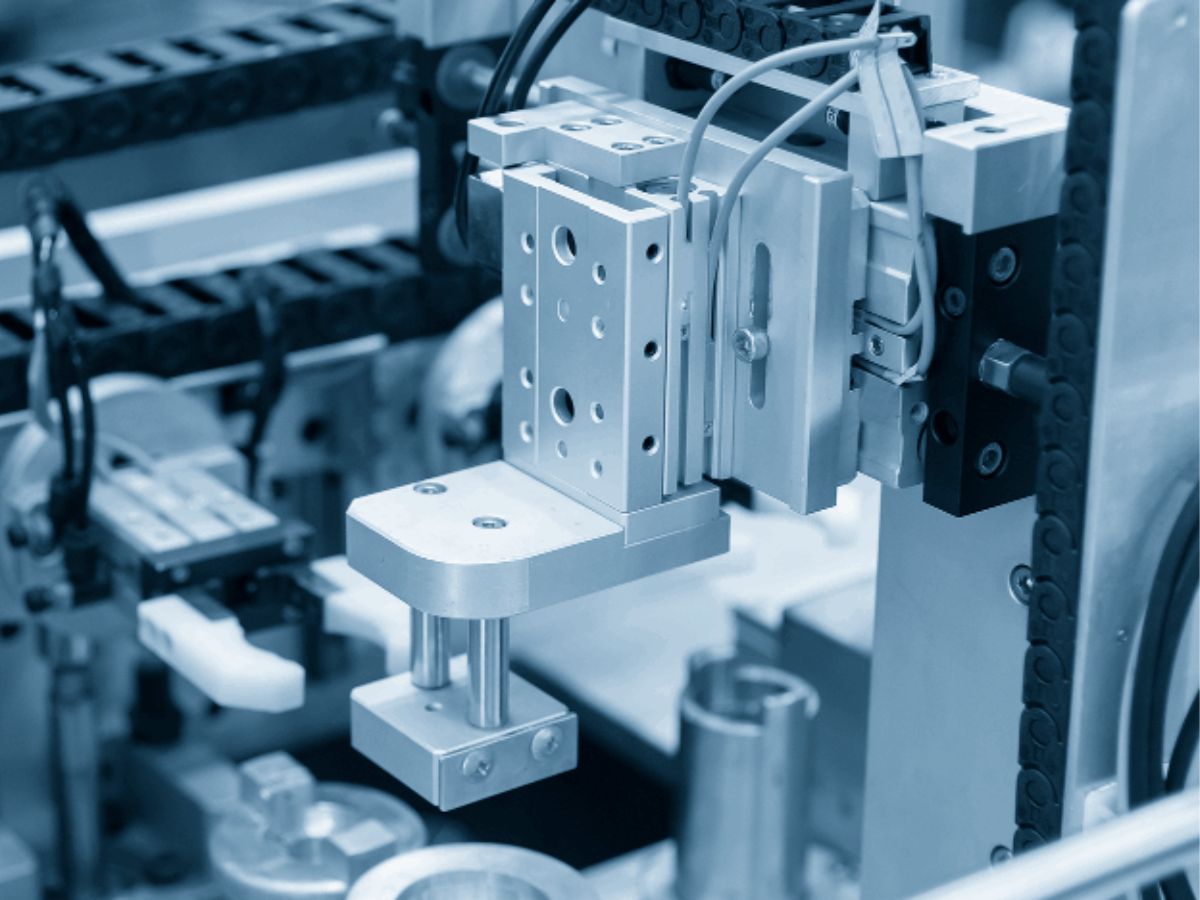
Actuador Rotatorio Lineal ZR de Alta PrecisiónEl actuador rotatorio lineal (también conocido como actuador ZR) es un módulo de movimiento bidimensional altamente integrado que combina funciones de elevación lineal (eje Z) y rotación de 360° (eje R). Utiliza un motor lineal para movimiento lineal preciso y un servomotor para accionar el movimiento rotacional. Al combinar ambos ejes, puede realizar acciones compuestas sincronizadas como elevación, rotación y calibración angular. Es ideal para aplicaciones de alta precisión como colocación de chips semiconductores y ensamblaje de precisión.Detalles Pinza Eléctrica Servo para Robot Industrial InteligenteLa pinza eléctrica para robot es un efector final inteligente accionado por un servomotor, diseñado para escenarios de automatización industrial, y puede lograr el agarre, manejo y ensamblaje preciso de materiales en el extremo del robot. Su núcleo consta de un motor, un mecanismo de reducción, un sensor y un sistema de control, y admite un agarre adaptable con precisión de nivel milimétrico a micrométrico, siendo adecuado para la producción flexible de micro piezas de trabajo como componentes electrónicos, equipos médicos y piezas de precisión.Detalles
Pinza Eléctrica Servo para Robot Industrial InteligenteLa pinza eléctrica para robot es un efector final inteligente accionado por un servomotor, diseñado para escenarios de automatización industrial, y puede lograr el agarre, manejo y ensamblaje preciso de materiales en el extremo del robot. Su núcleo consta de un motor, un mecanismo de reducción, un sensor y un sistema de control, y admite un agarre adaptable con precisión de nivel milimétrico a micrométrico, siendo adecuado para la producción flexible de micro piezas de trabajo como componentes electrónicos, equipos médicos y piezas de precisión.Detalles Pinza giratoria eléctrica con control preciso de 360°La pinza rotatoria eléctrica es un efector final mecatrónico que combina funciones de agarre y rotación. Impulsa el mecanismo de engranajes o correa síncrona mediante un servomotor integrado para lograr una rotación sincrónica durante el proceso de agarre de la pieza (como al enroscar tapones de botellas y ensamblar engranajes). Su núcleo consta de un motor, un reductor, un mecanismo de pinza y un controlador. Permite una rotación de 360° sin ángulos muertos y un control preciso del ángulo de rotación, y es ideal para aplicaciones como líneas de montaje automatizadas y operaciones con instrumentos de laboratorio.Detalles
Pinza giratoria eléctrica con control preciso de 360°La pinza rotatoria eléctrica es un efector final mecatrónico que combina funciones de agarre y rotación. Impulsa el mecanismo de engranajes o correa síncrona mediante un servomotor integrado para lograr una rotación sincrónica durante el proceso de agarre de la pieza (como al enroscar tapones de botellas y ensamblar engranajes). Su núcleo consta de un motor, un reductor, un mecanismo de pinza y un controlador. Permite una rotación de 360° sin ángulos muertos y un control preciso del ángulo de rotación, y es ideal para aplicaciones como líneas de montaje automatizadas y operaciones con instrumentos de laboratorio.Detalles Pinza Paralela Eléctrica Rápida y Estable para RobotLa pinza paralela eléctrica es un efector final de robot innovador que logra un agarre rápido y estable de objetos mediante un accionamiento de motor preciso y un mecanismo de transmisión. Sus dedos de agarre se mueven en paralelo en un plano, con una carrera ajustable máxima de 0-180 mm y una fuerza de agarre de un solo dedo de 2N~800N. Utiliza tecnología de motor avanzada y algoritmos de inteligencia artificial para ajustar automáticamente el método de agarre en diversos entornos complejos para adaptarse a diferentes formas, tamaños y posiciones de objetos. Este dispositivo no requiere una fuente de aire externa, tiene una estructura compacta, admite múltiples métodos de instalación y es adecuado para implementación en espacios pequeños.Detalles
Pinza Paralela Eléctrica Rápida y Estable para RobotLa pinza paralela eléctrica es un efector final de robot innovador que logra un agarre rápido y estable de objetos mediante un accionamiento de motor preciso y un mecanismo de transmisión. Sus dedos de agarre se mueven en paralelo en un plano, con una carrera ajustable máxima de 0-180 mm y una fuerza de agarre de un solo dedo de 2N~800N. Utiliza tecnología de motor avanzada y algoritmos de inteligencia artificial para ajustar automáticamente el método de agarre en diversos entornos complejos para adaptarse a diferentes formas, tamaños y posiciones de objetos. Este dispositivo no requiere una fuente de aire externa, tiene una estructura compacta, admite múltiples métodos de instalación y es adecuado para implementación en espacios pequeños.Detalles







Cilindro Eléctrico Micro

Copa de succión de vacío eléctrica
 Actuador eléctrico de vacío de la serie EVS para paletizado en automatización industrialEl actuador de vacío eléctrico de la serie EVS de HONPINE es una solución EOAT compacta y energéticamente eficiente diseñada para la automatización industrial, como recogida y colocación, paletizado y manipulación de materiales.
Actuador eléctrico de vacío de la serie EVS para paletizado en automatización industrialEl actuador de vacío eléctrico de la serie EVS de HONPINE es una solución EOAT compacta y energéticamente eficiente diseñada para la automatización industrial, como recogida y colocación, paletizado y manipulación de materiales.
Con un peso de solo 2.5 kg y una capacidad de carga útil de hasta 10 kg, ofrece un alto rendimiento en una estructura ligera. Alimentado por un sistema de baja tensión de 24 V, reduce el consumo de energía a aproximadamente el 20% de los sistemas neumáticos tradicionales, ayudando a disminuir los costes operativos.
El EVS cuenta con una fuerza de succión ajustable de 102 N a 510 N para diferentes piezas de trabajo. Su diseño compacto es un 30% más pequeño que las soluciones neumáticas, lo que lo hace adecuado para aplicaciones robóticas con espacio limitado.
Con montaje directo en el robot, retroalimentación de vacío en tiempo real y funciones de monitorización inteligente, el EVS garantiza un funcionamiento estable, eficiente y fiable en líneas de producción automatizadas.Detalles Copa de succión eléctrica para robotLa copa de succión eléctrica para robot es un efector final accionado eléctricamente basado en el principio de adsorción al vacío. Utiliza una bomba de vacío integrada para generar presión negativa y sujetar objetos, reemplazando eficazmente los métodos tradicionales de manipulación manual. El diseño central integra un sistema de control inteligente y una estructura de sellado multicapa, lo que la hace adecuada para manipular superficies lisas o ligeramente rugosas, como baldosas, losas de piedra y vidrio.Detalles
Copa de succión eléctrica para robotLa copa de succión eléctrica para robot es un efector final accionado eléctricamente basado en el principio de adsorción al vacío. Utiliza una bomba de vacío integrada para generar presión negativa y sujetar objetos, reemplazando eficazmente los métodos tradicionales de manipulación manual. El diseño central integra un sistema de control inteligente y una estructura de sellado multicapa, lo que la hace adecuada para manipular superficies lisas o ligeramente rugosas, como baldosas, losas de piedra y vidrio.Detalles


Mano Robótica Hábil - Preguntas Frecuentes
En robótica, un efector final es la herramienta acoplada al extremo de un brazo robótico que interactúa con el entorno externo. También conocido como herramienta de extremo de brazo (EOAT), está definido por las normas ISO como un dispositivo conectado al brazo robótico mediante una brida para la ejecución de tareas, y no se considera parte del propio brazo robótico.
En la cinemática robótica, el efector final es esencialmente la “mano” del robot. El sistema de coordenadas acoplado a él se denomina marco de herramienta, cuyo origen suele definirse como el Punto Central de la Herramienta (TCP). Los usuarios también pueden personalizar el TCP para tareas específicas, como establecer la punta de una boquilla de soldadura como el TCP en la soldadura robótica.
Los efectores finales comunes incluyen pinzas, cambiadores de herramientas, pistolas de soldadura, ventosas y pistolas de pulverización. También se pueden integrar sensores para mejorar el rendimiento y la precisión de la tarea.
1. Manos diestras
Las manos diestras son efectores finales de alto DOF que imitan las manos humanas, permitiendo agarrar, torcer, rotar, y otras tareas complejas para robots humanoides.
2. Efectores finales de tipo abrazadera
Estos utilizan pinzas mecánicas para sujetar objetos de forma segura y se usan comúnmente en la automatización industrial.
3. Efectores finales de tipo vacío/succión
Estos utilizan succión al vacío para manipular artículos planos o ligeros como vidrio, embalaje, y componentes electrónicos.
4. Efectores finales especializados
Herramientas diseñadas a medida para tareas específicas como soldadura, pintura, pulido, o cirugía.
Grados de libertad (GDL) pasivos:
Estos grados de libertad no son accionados directamente por motores. En cambio, el movimiento se transmite a través de elementos mecánicos como engranajes, tendones o articulaciones, lo que permite un movimiento adaptativo impulsado por fuerzas externas o articulaciones acopladas.
Grados de libertad (GDL) activos:
Estos grados de libertad son controlados directa y automáticamente por motores, lo que permite un control preciso y programable del movimiento y la fuerza.
La mano en sí no integra un sensor de visión incorporado. Sin embargo, se puede agregar un módulo de visión externo para permitir la percepción visual.
Para la percepción táctil, se requieren almohadillas de detección capacitivas o piezorresistivas (resistivas) para detectar contacto, presión y fuerzas de interacción.
Las especificaciones de los sensores piezorresistivos y capacitivos se proporcionarán de acuerdo con su configuración de producto específica y requisitos de selección.
Sí, ofrecemos guantes de teleoperación y su precio es más competitivo que la mayoría de las alternativas en el mercado.
La mano diestra de HONPINE logra un equilibrio óptimo entre rendimiento y costo mediante módulos de accionamiento de bajo costo desarrollados internamente combinados con marcos algorítmicos de código abierto.
Esto se ve respaldado además por el ecosistema de cadena de suministro bien establecido de China. Además, las amplias aplicaciones en escenarios industriales y médicos proporcionan abundantes datos del mundo real para una rápida iteración tecnológica. En conjunto, estos factores constituyen la base fundamental para construir una “solución tecnológica basada en China” competitiva a nivel mundial.
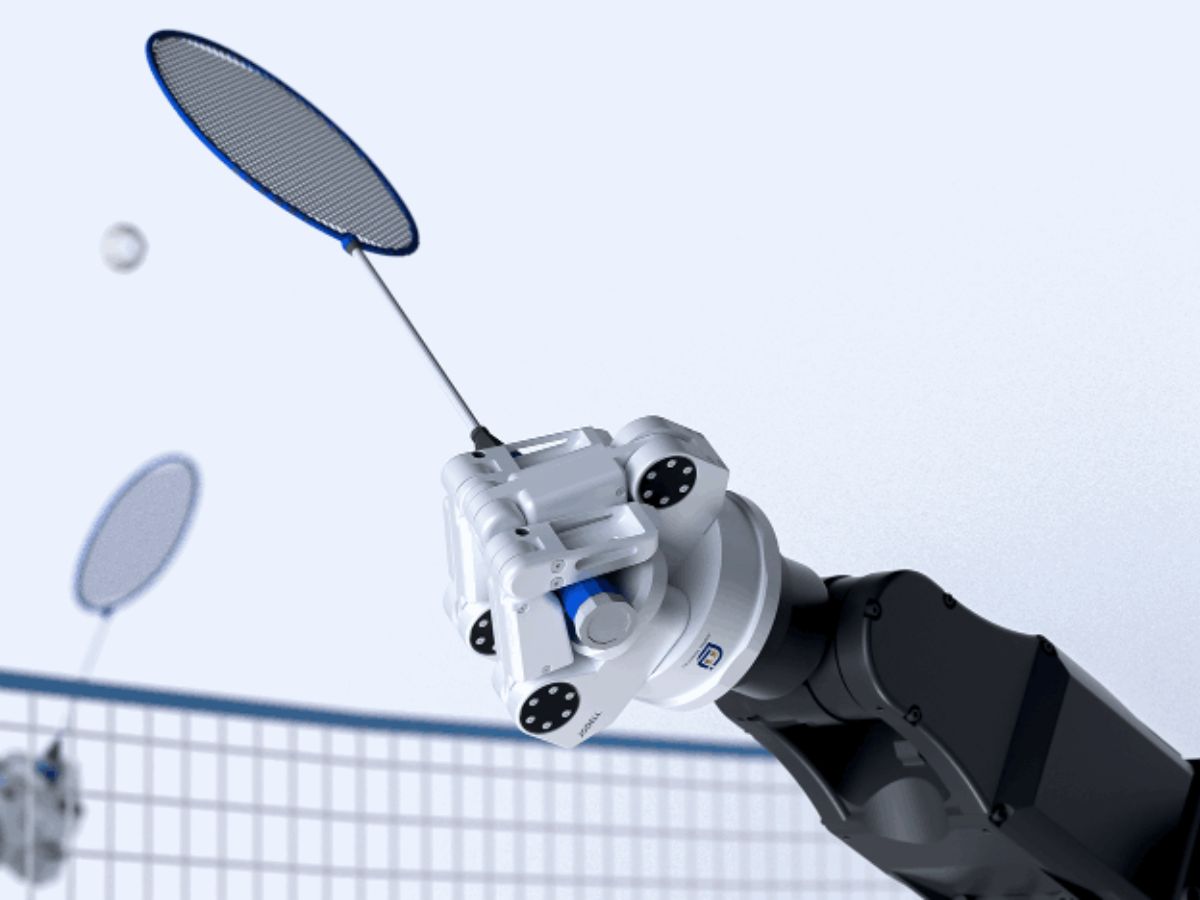
Al aprovechar una estructura biomimética accionada por tendones, un control de par de alta precisión, y una rápida respuesta dinámica, las manos diestras de HONPINE demuestran capacidades excepcionales de manipulación fina.
Muestran plenamente las ventajas técnicas de la coordinación de múltiples grados de libertad y de la percepción controlada por fuerza, permitiendo operaciones precisas, estables, y diestras de la mano robótica.
La mano diestra humanoide modular de nueva generación, Linker Hand L30, cuenta con 22 grados de libertad en toda la mano, integrando profundamente principios biomiméticos con tecnologías mecatrónicas avanzadas.
Mientras logra un diseño altamente antropomórfico, también incorpora capacidades de control de alta precisión y detección en tiempo real. Las velocidades de las articulaciones principales superan los 400°/s, y la apertura o el cierre completos de la mano pueden completarse en solo 0.2 segundos.
Su rendimiento de movimiento de alta velocidad y manipulación precisa han impresionado al público en las demostraciones en vivo.
A. Capacidad de carga útil
Incluye el peso tanto del efector final como del objeto manipulado. El par causado por el centro de gravedad del objeto debe mantenerse dentro del límite de carga de la muñeca del robot.
B. Grados de libertad (DOF)
Las pinzas básicas suelen tener un DOF (abrir/cerrar), mientras que las tareas complejas pueden requerir múltiples DOF, lo que aumenta la flexibilidad pero también el costo y la complejidad del control.
C. Precisión y repetibilidad
Las tareas de alta precisión requieren repetibilidad a nivel de micras. Las pinzas eléctricas suelen ofrecer un mejor control de posición que las neumáticas.
D. Adaptabilidad al entorno
Pueden necesitarse diseños especiales para temperaturas extremas, salas limpias o entornos industriales a prueba de explosiones.
E. Sistemas de cambio de herramienta
Los cambiadores automáticos de herramientas permiten a los robots cambiar de tarea rápidamente mediante conexiones mecánicas, eléctricas y neumáticas/hidráulicas fiables.
Para que los robots humanoides realmente reemplacen a los humanos en tareas como el agarre, el transporte, el ensamblaje, el giro y la manipulación, estas acciones deben ejecutarse en última instancia a través de las “manos.”
Como efector final del robot, la mano diestra sirve como la interfaz física directa entre el robot y el mundo exterior. Su rendimiento determina fundamentalmente los límites de capacidad práctica del robot.
Sin manos diestras, los robots humanoides pueden ser capaces de “ver” y “caminar,” pero no pueden verdaderamente “hacer.”
Por eso Elon Musk ha descrito la mano diestra como uno de los desafíos técnicos más difíciles en el desarrollo de Optimus.
La mano diestra humanoide modular de nueva generación, Linker Hand L30, cuenta con 22 grados de libertad en toda la mano, integrando profundamente principios biomiméticos con tecnologías mecatrónicas avanzadas.
Mientras logra un diseño altamente antropomórfico, también incorpora capacidades de control de alta precisión y detección en tiempo real. Las velocidades de las articulaciones principales superan los 400°/s, y la apertura o el cierre completos de la mano pueden completarse en solo 0.2 segundos.
Su rendimiento de movimiento de alta velocidad y manipulación precisa han impresionado al público en las demostraciones en vivo.
La mano diestra de HONPINE logra un equilibrio óptimo entre rendimiento y costo mediante módulos de accionamiento de bajo costo desarrollados internamente combinados con marcos algorítmicos de código abierto.
Esto se ve respaldado además por el ecosistema de cadena de suministro bien establecido de China. Además, las amplias aplicaciones en escenarios industriales y médicos proporcionan abundantes datos del mundo real para una rápida iteración tecnológica. En conjunto, estos factores constituyen la base fundamental para construir una “solución tecnológica basada en China” competitiva a nivel mundial.
Al aprovechar una estructura biomimética accionada por tendones, un control de par de alta precisión, y una rápida respuesta dinámica, las manos diestras de HONPINE demuestran capacidades excepcionales de manipulación fina.
Muestran plenamente las ventajas técnicas de la coordinación de múltiples grados de libertad y de la percepción controlada por fuerza, permitiendo operaciones precisas, estables, y diestras de la mano robótica.
Aplicación del Efectuador Final de Robot
El efectuador final de robot ofrece nueve series que incluyen manos industriales hábiles, pinzas eléctricas inteligentes,ventosas eléctricas y modelos multifuncionales para automatización médica, baterías de litio, 3C, semiconductores yindustrias alimentarias. Compactos en diseño, nuestros actuadores garantizan alta precisión, alta rigidez y carrera
ultralarga con control de fuerza preciso. Son compatibles con aplicaciones en red, fáciles de instalar y simples deoperar, proporcionando soluciones de automatización seguras y eficientes para diversas necesidades de producción.
‹


›

- 00
0000-00
¿Qué es un actuador de articulación robótica?¿Cómo elegir el mejor actuador rotativo para articulaciones robóticas?
- 00
0000-00
Wiki de Tecnología de Transmisión de Accionamiento Armónico
- 00
0000-00
El actuador rotatorio armónico ayuda a implementar la primera estación de carga móvil aérea inteligente para vehículos eléctricos de CC con cambio de vía del mundo
- 00
0000-00
Accionamiento Armónico Ultracompacto – Fabricación de Precisión con Materiales de Alta Gama
- 00
0000-00
El secreto detrás de la ultra alta calidad de los reductores planetarios de alta precisión HONPINE





