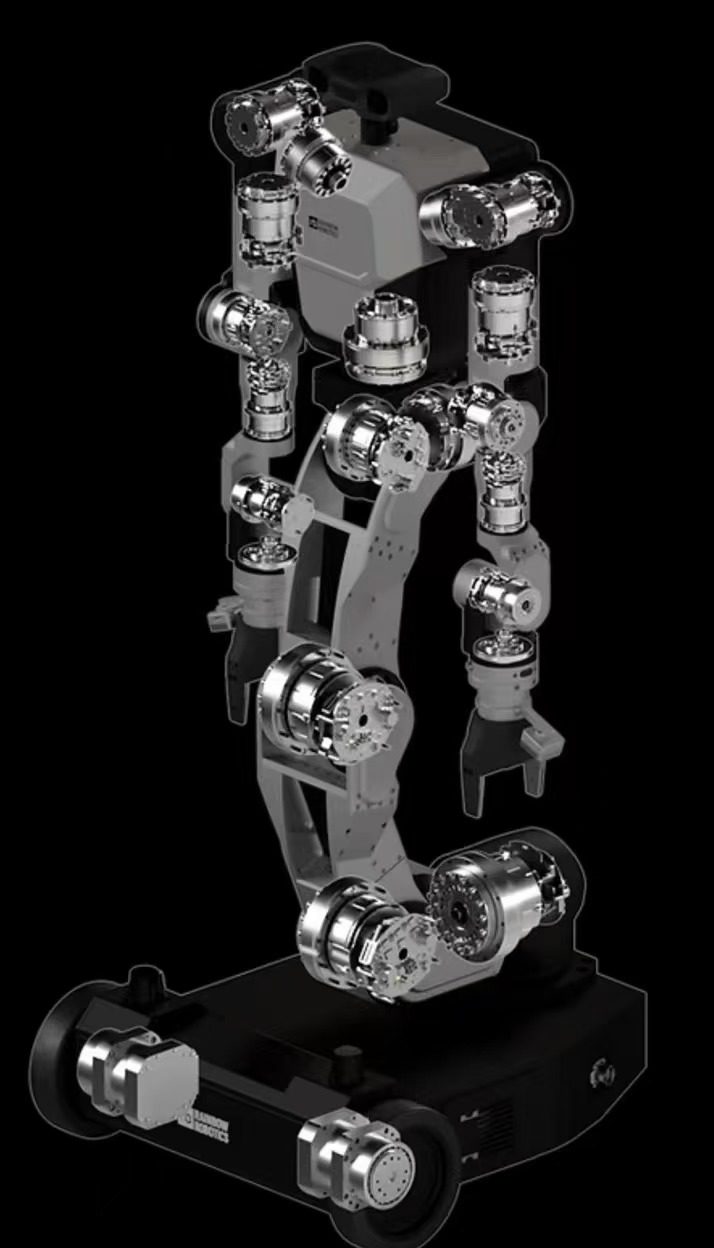
Motor de articulación robótica planetaria armónica sin bastidor
Motor de articulación armónico
Los motores de articulación con harmonic drive de HONPINE se caracterizan por alta precisión, alto par y gran diámetro de núcleo hueco, y a menudo proporcionan soluciones para aplicaciones en espacios confinados. Se admite la personalización, y estos motores se utilizan con frecuencia en el campo de la robótica especializada.
 Motor de rueda de dirección omnidireccional para robots móviles inteligentesEste producto es un motor de rueda de dirección omnidireccional avanzado diseñado para robots móviles inteligentes. Supera las limitaciones del ángulo de dirección de las ruedas convencionales, permitiendo una rotación continua de 360° y un movimiento multidireccional. Con un diseño de arnés de cableado fijo, elimina fundamentalmente el desgaste de los cables y los riesgos de enredos, extendiendo la vida útil de los componentes críticos en más de 10 veces. Es ideal para AGVs, AMRs, chasis de robots humanoides y otras aplicaciones robóticas móviles, y ha demostrado operar de forma fiable en entornos exigentes como la logística de cadena de frío, fábricas y almacenes.Detalles
Motor de rueda de dirección omnidireccional para robots móviles inteligentesEste producto es un motor de rueda de dirección omnidireccional avanzado diseñado para robots móviles inteligentes. Supera las limitaciones del ángulo de dirección de las ruedas convencionales, permitiendo una rotación continua de 360° y un movimiento multidireccional. Con un diseño de arnés de cableado fijo, elimina fundamentalmente el desgaste de los cables y los riesgos de enredos, extendiendo la vida útil de los componentes críticos en más de 10 veces. Es ideal para AGVs, AMRs, chasis de robots humanoides y otras aplicaciones robóticas móviles, y ha demostrado operar de forma fiable en entornos exigentes como la logística de cadena de frío, fábricas y almacenes.Detalles Actuador de motor de CC de rueda motriz con dirección diferencial de dos ruedasUna rueda motriz con dirección diferencial es un sistema de tracción de dos ruedas en el que cada rueda está equipada con un actuador independiente, como un motor de CC. El nombre proviene del hecho de que el vector de movimiento del vehículo es el resultado de la combinación de los movimientos de las dos ruedas accionadas de forma independiente. Al controlar que los dos motores de tracción giren en direcciones opuestas o a diferentes velocidades, el par motor se transmite a través de una caja de engranajes y ruedas recubiertas de poliuretano, lo que hace que las dos ruedas dentro de la unidad de tracción diferencial giren en sentido opuesto o a diferentes velocidades. Esto genera el ángulo de dirección requerido y permite las maniobras del vehículo.Detalles
Actuador de motor de CC de rueda motriz con dirección diferencial de dos ruedasUna rueda motriz con dirección diferencial es un sistema de tracción de dos ruedas en el que cada rueda está equipada con un actuador independiente, como un motor de CC. El nombre proviene del hecho de que el vector de movimiento del vehículo es el resultado de la combinación de los movimientos de las dos ruedas accionadas de forma independiente. Al controlar que los dos motores de tracción giren en direcciones opuestas o a diferentes velocidades, el par motor se transmite a través de una caja de engranajes y ruedas recubiertas de poliuretano, lo que hace que las dos ruedas dentro de la unidad de tracción diferencial giren en sentido opuesto o a diferentes velocidades. Esto genera el ángulo de dirección requerido y permite las maniobras del vehículo.Detalles Motor de rueda motriz vertical para carretillas elevadoras AGV y AMREsta rueda motriz vertical está diseñada para AGVs, AMRs y carretillas elevadoras con capacidades de hasta 10 toneladas, cubriendo prácticamente todos los tipos de carretillas elevadoras. Las aplicaciones más comunes son carretillas elevadoras con capacidades de carga que van de 1.5 a 3 toneladas.
Motor de rueda motriz vertical para carretillas elevadoras AGV y AMREsta rueda motriz vertical está diseñada para AGVs, AMRs y carretillas elevadoras con capacidades de hasta 10 toneladas, cubriendo prácticamente todos los tipos de carretillas elevadoras. Las aplicaciones más comunes son carretillas elevadoras con capacidades de carga que van de 1.5 a 3 toneladas.
Con el avance de Internet of Things (IoT), las tecnologías de navegación LiDAR y la adopción generalizada de 5G, las carretillas elevadoras están evolucionando gradualmente de la operación manual a la operación asistida y, en última instancia, al control totalmente autónomo. Como resultado, la transformación de las carretillas elevadoras convencionales en carretillas elevadoras no tripuladas y AGVs (Automated Guided Vehicles) se ha convertido en una tendencia inevitable de la industria. Esta rueda motriz vertical está desarrollada para acelerar la transición de las carretillas elevadoras AGV mediante un diseño ligero, una estructura compacta y una integración inteligente.Detalles Rotación de 360° de rueda de dirección vertical para exterioresLa rueda de dirección vertical está diseñada para aplicaciones en exteriores, ofreciendo una excelente capacidad de cruce de agua, así como un gran rendimiento para subir y superar obstáculos.El término rueda de dirección vertical se refiere a una estructura en la que el motor está montado verticalmente sobre la rueda motriz.Cuando se integra con un controlador de accionamiento, una plataforma móvil equipada con una sola rueda de dirección puede realizar funciones de arranque/parada, movimiento hacia adelante y hacia atrás, y dirección.Cuando se configuran dos o más ruedas de dirección, el sistema permite rotación de radio cero, movimiento lateral, rotación omnidireccional de 360°, desplazamiento en línea recta, movimiento lateral, movimiento diagonal y trayectorias curvas, lo que permite un movimiento libre en cualquier dirección sobre un plano bidimensional.Detalles
Rotación de 360° de rueda de dirección vertical para exterioresLa rueda de dirección vertical está diseñada para aplicaciones en exteriores, ofreciendo una excelente capacidad de cruce de agua, así como un gran rendimiento para subir y superar obstáculos.El término rueda de dirección vertical se refiere a una estructura en la que el motor está montado verticalmente sobre la rueda motriz.Cuando se integra con un controlador de accionamiento, una plataforma móvil equipada con una sola rueda de dirección puede realizar funciones de arranque/parada, movimiento hacia adelante y hacia atrás, y dirección.Cuando se configuran dos o más ruedas de dirección, el sistema permite rotación de radio cero, movimiento lateral, rotación omnidireccional de 360°, desplazamiento en línea recta, movimiento lateral, movimiento diagonal y trayectorias curvas, lo que permite un movimiento libre en cualquier dirección sobre un plano bidimensional.Detalles Motor mecatrónico de rueda con transmisión horizontalUna rueda motriz horizontal es un producto integrado mecatrónico en el que el motor de accionamiento de tracción se monta horizontalmente sobre la rueda motriz. Integra el motor de tracción con una unidad de retroalimentación de velocidad, un mecanismo de transmisión de reducción, un sistema de frenado, una estructura de montaje y soporte, y una rueda recubierta de goma. Presenta baja altura de instalación, alta precisión, diseño ligero, alta capacidad de carga, alto par, alta velocidad, rendimiento fiable, larga vida útil, fácil instalación y mantenimiento conveniente.Detalles
Motor mecatrónico de rueda con transmisión horizontalUna rueda motriz horizontal es un producto integrado mecatrónico en el que el motor de accionamiento de tracción se monta horizontalmente sobre la rueda motriz. Integra el motor de tracción con una unidad de retroalimentación de velocidad, un mecanismo de transmisión de reducción, un sistema de frenado, una estructura de montaje y soporte, y una rueda recubierta de goma. Presenta baja altura de instalación, alta precisión, diseño ligero, alta capacidad de carga, alto par, alta velocidad, rendimiento fiable, larga vida útil, fácil instalación y mantenimiento conveniente.Detalles Rueda de dirección horizontal AGV giratoria 360°La rueda de dirección horizontal AGV presenta un diseño integrado que combina un motor de dirección, un mecanismo de transmisión de reducción, una unidad de retroalimentación de posición, un dispositivo de límite y un mecanismo rotatorio en un solo módulo compacto.
Rueda de dirección horizontal AGV giratoria 360°La rueda de dirección horizontal AGV presenta un diseño integrado que combina un motor de dirección, un mecanismo de transmisión de reducción, una unidad de retroalimentación de posición, un dispositivo de límite y un mecanismo rotatorio en un solo módulo compacto.
Cuando se equipa con un controlador de accionamiento, una plataforma móvil configurada con una sola rueda de dirección puede realizar las funciones de arranque/parada, avance y retroceso, y dirección.
Cuando se utilizan dos o más ruedas de dirección, el sistema permite la rotación de radio cero, el movimiento lateral, la rotación omnidireccional de 360°, el desplazamiento en línea recta, el movimiento lateral, el movimiento diagonal y las trayectorias curvas, lo que permite el movimiento libre en cualquier dirección sobre un plano bidimensional.Detalles Motor de buje servo integrado para robots AGVEl motor de buje servo integrado está diseñado para robots de servicio, AGV de logística de almacén y sistemas médicos compactos. Con una arquitectura totalmente integrada de accionamiento y buje, simplifica significativamente la instalación y el diseño del sistema. Con una clasificación de protección IP67, el motor ofrece un rendimiento confiable incluso en entornos exigentes o adversos. Proporciona un alto par de salida y una excelente capacidad de sobrecarga, garantizando una potencia fuerte y constante para tareas pesadas, pendientes y operación continua. Su suave rendimiento a baja velocidad y su control preciso lo convierten en una solución de propulsión ideal para robots que realizan aplicaciones de limpieza, desinfección, inspección, entrega y guiado.Detalles
Motor de buje servo integrado para robots AGVEl motor de buje servo integrado está diseñado para robots de servicio, AGV de logística de almacén y sistemas médicos compactos. Con una arquitectura totalmente integrada de accionamiento y buje, simplifica significativamente la instalación y el diseño del sistema. Con una clasificación de protección IP67, el motor ofrece un rendimiento confiable incluso en entornos exigentes o adversos. Proporciona un alto par de salida y una excelente capacidad de sobrecarga, garantizando una potencia fuerte y constante para tareas pesadas, pendientes y operación continua. Su suave rendimiento a baja velocidad y su control preciso lo convierten en una solución de propulsión ideal para robots que realizan aplicaciones de limpieza, desinfección, inspección, entrega y guiado.Detalles Módulo de dirección de cuatro ruedas para robots humanoides de alta eficienciaA medida que los escenarios de aplicación para robots humanoides de uso general (incluidos los robots humanoides con ruedas) continúan expandiéndose, se están planteando mayores demandas en cuanto a la flexibilidad de la movilidad de los robots. Los chasis de robots tradicionales con tracción diferencial no pueden lograr movimiento lateral en el lugar, sufren limitaciones en el radio de giro y operan con menor eficiencia debido a la falta de capacidades de movimiento omnidireccional.
Módulo de dirección de cuatro ruedas para robots humanoides de alta eficienciaA medida que los escenarios de aplicación para robots humanoides de uso general (incluidos los robots humanoides con ruedas) continúan expandiéndose, se están planteando mayores demandas en cuanto a la flexibilidad de la movilidad de los robots. Los chasis de robots tradicionales con tracción diferencial no pueden lograr movimiento lateral en el lugar, sufren limitaciones en el radio de giro y operan con menor eficiencia debido a la falta de capacidades de movimiento omnidireccional.
Para abordar estos desafíos, HONPINE ha lanzado las series iGMH e iGML de módulos de dirección y tracción con ruedas direccionales. Estos módulos integran altamente componentes clave, incluidos el servodriver, el servomotor, el codificador y la rueda, mejorando enormemente la utilización del espacio dentro del chasis del robot.Detalles Motor de rueda servo AGV AMR HubEl motor de rueda AGV (también conocido como motor servo Hub) es un sistema de accionamiento electromecánico altamente integrado que combina componentes clave, incluido el mecanismo de engranajes planetarios, motor servo, freno, codificador, controlador de accionamiento y conjunto de ruedas en una unidad compacta. Este módulo adopta un diseño de motor de par sin marco para accionar directamente el movimiento de la rueda, reemplazando la solución tradicional separada de "motor + reductor + rueda", y posee capacidades de control de movimiento de alta precisión. Se aplica principalmente en AGV (Vehículos de Guiado Automatizado), AMR (Robots Móviles Autónomos) y equipos de automatización industrial, satisfaciendo las demandas de manejo eficiente de materiales en campos como logística de almacenamiento y fabricación inteligente. Los motores hub demuestran ventajas significativas en mejorar la eficiencia del equipo, reducir costos integrales y adaptarse a escenarios complejos.Detalles
Motor de rueda servo AGV AMR HubEl motor de rueda AGV (también conocido como motor servo Hub) es un sistema de accionamiento electromecánico altamente integrado que combina componentes clave, incluido el mecanismo de engranajes planetarios, motor servo, freno, codificador, controlador de accionamiento y conjunto de ruedas en una unidad compacta. Este módulo adopta un diseño de motor de par sin marco para accionar directamente el movimiento de la rueda, reemplazando la solución tradicional separada de "motor + reductor + rueda", y posee capacidades de control de movimiento de alta precisión. Se aplica principalmente en AGV (Vehículos de Guiado Automatizado), AMR (Robots Móviles Autónomos) y equipos de automatización industrial, satisfaciendo las demandas de manejo eficiente de materiales en campos como logística de almacenamiento y fabricación inteligente. Los motores hub demuestran ventajas significativas en mejorar la eficiencia del equipo, reducir costos integrales y adaptarse a escenarios complejos.Detalles









Motor de articulación planetario
El motor de articulación planetaria también es un componente central de los sistemas de potencia robóticos. En comparación con los módulos de articulación armónica, presenta una relación de reducción menor, una mayor velocidad de salida y una mayor rigidez, aunque con una precisión de salida general ligeramente inferior. Mediante componentes altamente integrados, incluidos reductores planetarios, motores de par sin bastidor, frenos, encoders y drivers, su tamaño y peso se optimizan significativamente, lo que permite un control preciso del movimiento articular. Esto da como resultado un mayor par, dimensiones más compactas y menor peso. Los motores de articulación planetaria suelen admitir un amplio rango de voltaje, adaptándose a DC 24V~48V de bajo voltaje. También ofrecemos soluciones personalizadas basadas en los requisitos individuales de cada cliente.
 Actuador de junta planetaria para perro robótico a prueba de explosiones para servicio pesadoLos actuadores articulares planetarios antideflagrantes de gran resistencia de HONPINE han entrado oficialmente en producción en masa. Esta serie de articulaciones se ha integrado con éxito en múltiples plataformas de robots cuadrúpedos (perros robot) y se ha desplegado en entornos peligrosos como plantas petroquímicas, sitios de inspección de gas natural y operaciones de rescate de emergencia: áreas que antes dependían en gran medida del trabajo manual o de componentes importados.
Actuador de junta planetaria para perro robótico a prueba de explosiones para servicio pesadoLos actuadores articulares planetarios antideflagrantes de gran resistencia de HONPINE han entrado oficialmente en producción en masa. Esta serie de articulaciones se ha integrado con éxito en múltiples plataformas de robots cuadrúpedos (perros robot) y se ha desplegado en entornos peligrosos como plantas petroquímicas, sitios de inspección de gas natural y operaciones de rescate de emergencia: áreas que antes dependían en gran medida del trabajo manual o de componentes importados.
Asistencia de integración específica para la aplicación: estructuras mecánicas y parámetros de control personalizados según las distintas configuraciones del robot y los requisitos de la misión.
Asistencia para la certificación antideflagrante: apoyo durante todo el proceso de certificación, ayudando a los clientes a evitar errores de diseño comunes y a acelerar el cumplimiento normativo.
Soporte técnico rápido: centros de servicio técnico ubicados en las principales regiones industriales del país, con respuesta in situ en un plazo de 48 horas.Detalles Módulos de articulación planetaria de mayor salida de par y peso ligeroLos módulos de articulación planetaria de la serie PA de HONPINE cuentan con tres patentes exclusivas de invención y siete patentes de modelo de utilidad. Con un ingenioso diseño estructural, ofrecen la mayor salida de par entre los productos de la misma clase, proporcionando un rendimiento potente y estable.
Módulos de articulación planetaria de mayor salida de par y peso ligeroLos módulos de articulación planetaria de la serie PA de HONPINE cuentan con tres patentes exclusivas de invención y siete patentes de modelo de utilidad. Con un ingenioso diseño estructural, ofrecen la mayor salida de par entre los productos de la misma clase, proporcionando un rendimiento potente y estable.
HONPINE proporciona amplios recursos de producto y soporte técnico, lo que permite una rápida implementación en diversos escenarios de aplicación mientras reduce significativamente el tiempo, el esfuerzo y el costo requeridos durante la etapa de investigación preliminar del proyecto.
Los módulos adoptan un diseño de entrada/salida compartida de potencia y señal, simplificando en gran medida la conexión entre las unidades de accionamiento. Combinado con una estructura de cableado pasante hueca, la aplicación y la integración de las unidades de accionamiento se vuelven más convenientes y eficientes.Detalles Módulo de articulación planetaria compacto, ligero, resistente a impactos y de alta velocidadEl Módulo de Articulación Planetaria Estándar es un componente central de los sistemas de potencia robóticos. Mediante un diseño altamente integrado que combina un reductor planetario, un motor de par sin carcasa, freno, codificador y controlador, logra una optimización significativa en volumen y peso, permitiendo un control preciso del movimiento de la articulación. Esto da como resultado mayor par, menor tamaño y menor peso. En comparación con los módulos de articulación armónicos, el módulo de articulación planetaria presenta una relación de reducción menor, mayor velocidad de salida y mayor densidad de par, lo que lo hace más adecuado para aplicaciones de carga media a baja. También proporcionamos servicios de personalización adaptados a los requisitos específicos de los clientes.
Módulo de articulación planetaria compacto, ligero, resistente a impactos y de alta velocidadEl Módulo de Articulación Planetaria Estándar es un componente central de los sistemas de potencia robóticos. Mediante un diseño altamente integrado que combina un reductor planetario, un motor de par sin carcasa, freno, codificador y controlador, logra una optimización significativa en volumen y peso, permitiendo un control preciso del movimiento de la articulación. Esto da como resultado mayor par, menor tamaño y menor peso. En comparación con los módulos de articulación armónicos, el módulo de articulación planetaria presenta una relación de reducción menor, mayor velocidad de salida y mayor densidad de par, lo que lo hace más adecuado para aplicaciones de carga media a baja. También proporcionamos servicios de personalización adaptados a los requisitos específicos de los clientes.
Con ventajas clave como alto rendimiento a alta velocidad, resistencia al impacto y diseño compacto y ligero, el Módulo de Articulación Planetaria Estándar se ha convertido en la solución preferida para accionamientos de alta carga en robots humanoides, robots especializados, AGV logísticos y automatización industrial, impulsando avances en el rendimiento robótico y escenarios de aplicación más amplios.Detalles



Motor de par sin marco
El motor de par sin bastidor, un tipo especializado de motor síncrono de imanes permanentes (PMSM), consta de dos componentes centrales: el rotor y el estator, eliminando al mismo tiempo las estructuras tradicionales del motor, como carcasas, rodamientos y ejes. Diseñado para integrarse directamente en el sistema mecánico del cliente, requiere que el usuario final proporcione los rodamientos de soporte y las carcasas. Esta filosofía de diseño ofrece mayor flexibilidad, dimensiones más compactas y un rendimiento superior, lo que lo hace ideal para aplicaciones con exigencias estrictas de espacio, peso y capacidades dinámicas. Destaca en escenarios de alta precisión y alta respuesta dinámica, incluida la actuación de articulaciones de robots humanoides, mesas rotativas de precisión, equipos médicos y sistemas de automatización industrial.Los motores de par sin bastidor se subcategorizaron además en motores sin bastidor de rotor interno y motores sin bastidor de rotor externo, según su configuración estructural.
 Motores sin bastidor de alta densidad de par para robótica FM2Los motores de par sin bastidor HONPINE FM2 para robótica ofrecen un mayor rendimiento y más opciones de configuración en comparación con la serie FM1, lo que los hace adecuados para una gama más amplia de aplicaciones. Las pérdidas del motor se reducen en 20%, mientras que la salida de par aumenta en 10% en comparación con los motores FM1, lo que da como resultado una mayor duración operativa.
Motores sin bastidor de alta densidad de par para robótica FM2Los motores de par sin bastidor HONPINE FM2 para robótica ofrecen un mayor rendimiento y más opciones de configuración en comparación con la serie FM1, lo que los hace adecuados para una gama más amplia de aplicaciones. Las pérdidas del motor se reducen en 20%, mientras que la salida de par aumenta en 10% en comparación con los motores FM1, lo que da como resultado una mayor duración operativa.
La serie FM2 está disponible en seis diámetros que van desde φ50mm hasta φ127mm, con velocidades nominales de 1800 rpm a 5500 rpm, par de 0.36 Nm a 6.40 Nm y potencia de salida de 207 W a 608 W. Las tensiones nominales van desde 24 V hasta 70 V. Las configuraciones opcionales incluyen sensores Hall, sensores de temperatura y opciones personalizables de cables conductores.Estos motores se utilizan ampliamente en robots colaborativos, robots humanoides, robots cuadrúpedos, robots industriales y robots de rehabilitación médica.Detalles sin bastidor rentables FM1") Motores de CC sin escobillas (BLDC) sin bastidor rentables FM1Los motores de CC sin escobillas (BLDC) sin bastidor HONPINE FM1 son productos compactos, de alto rendimiento y rentables. Disponibles en cuatro tamaños (φ50mm–φ115mm), con velocidades nominales que van de 650 rpm a 5250 rpm, par de 0.3 Nm a 9.32 Nm, y potencia de 165 W a 920 W. Las tensiones nominales van de 24 V a 70 V, con sensores Hall, sensores de temperatura y configuraciones de cableado opcionales. Se utilizan ampliamente en robots colaborativos, robots humanoides, robots cuadrúpedos, y robots de rehabilitación médica.Detalles
Motores de CC sin escobillas (BLDC) sin bastidor rentables FM1Los motores de CC sin escobillas (BLDC) sin bastidor HONPINE FM1 son productos compactos, de alto rendimiento y rentables. Disponibles en cuatro tamaños (φ50mm–φ115mm), con velocidades nominales que van de 650 rpm a 5250 rpm, par de 0.3 Nm a 9.32 Nm, y potencia de 165 W a 920 W. Las tensiones nominales van de 24 V a 70 V, con sensores Hall, sensores de temperatura y configuraciones de cableado opcionales. Se utilizan ampliamente en robots colaborativos, robots humanoides, robots cuadrúpedos, y robots de rehabilitación médica.Detalles Motores de par sin bastidor FMK altamente integrados para articulaciones de robotsLos motores de par sin bastidor, a diferencia de los servomotores tradicionales, constan únicamente de componentes de estátor y rotor. En comparación con los motores con bastidor, los motores sin bastidor ofrecen una configuración flexible y una instalación sencilla. Teniendo en cuenta la tendencia creciente hacia sistemas de accionamiento altamente integrados, los motores sin bastidor satisfacen mejor las expectativas de los ingenieros. Los ingenieros ya no necesitan considerar las interfaces del motor en el diseño del sistema, lo que permite reducir al máximo el espacio ocupado por la unidad de salida de potencia en el sistema de accionamiento, logrando una mayor integración del sistema.Los motores de par sin bastidor HONPINE FMK se utilizan actualmente de forma generalizada en las articulaciones J1–J6 de robots colaborativos y de doble brazo, en las articulaciones de marcha de robots cuadrúpedos y en las articulaciones flexibles de robots humanoides.Detalles
Motores de par sin bastidor FMK altamente integrados para articulaciones de robotsLos motores de par sin bastidor, a diferencia de los servomotores tradicionales, constan únicamente de componentes de estátor y rotor. En comparación con los motores con bastidor, los motores sin bastidor ofrecen una configuración flexible y una instalación sencilla. Teniendo en cuenta la tendencia creciente hacia sistemas de accionamiento altamente integrados, los motores sin bastidor satisfacen mejor las expectativas de los ingenieros. Los ingenieros ya no necesitan considerar las interfaces del motor en el diseño del sistema, lo que permite reducir al máximo el espacio ocupado por la unidad de salida de potencia en el sistema de accionamiento, logrando una mayor integración del sistema.Los motores de par sin bastidor HONPINE FMK se utilizan actualmente de forma generalizada en las articulaciones J1–J6 de robots colaborativos y de doble brazo, en las articulaciones de marcha de robots cuadrúpedos y en las articulaciones flexibles de robots humanoides.Detalles Motor de par sin carcasa de rotor interno compacto y ligero con alta densidad de potenciaEl motor de par sin carcasa de rotor interno es un tipo especializado de motor síncrono de imanes permanentes (PMSM) compuesto por dos componentes principales: el rotor y el estator. El rotor está posicionado internamente, mientras que el estator está montado externamente. Su diseño innovador elimina las carcasas, cojinetes y ejes tradicionales de los motores, conservando solo los conjuntos del rotor y el estator. El rotor generalmente adopta una estructura anular integrada con imanes permanentes, montada directamente en el eje de carga. El estator consta de devanados de cobre y láminas, generando fuerzas electromagnéticas para impulsar la rotación del rotor. Esta configuración logra la salida de par mediante una interacción eficiente del campo magnético, lo que lo hace ideal para aplicaciones de alta precisión, como articulaciones robóticas y automatización industrial. Permite accionar cargas directamente, minimizando las pérdidas por transmisión mecánica.Detalles
Motor de par sin carcasa de rotor interno compacto y ligero con alta densidad de potenciaEl motor de par sin carcasa de rotor interno es un tipo especializado de motor síncrono de imanes permanentes (PMSM) compuesto por dos componentes principales: el rotor y el estator. El rotor está posicionado internamente, mientras que el estator está montado externamente. Su diseño innovador elimina las carcasas, cojinetes y ejes tradicionales de los motores, conservando solo los conjuntos del rotor y el estator. El rotor generalmente adopta una estructura anular integrada con imanes permanentes, montada directamente en el eje de carga. El estator consta de devanados de cobre y láminas, generando fuerzas electromagnéticas para impulsar la rotación del rotor. Esta configuración logra la salida de par mediante una interacción eficiente del campo magnético, lo que lo hace ideal para aplicaciones de alta precisión, como articulaciones robóticas y automatización industrial. Permite accionar cargas directamente, minimizando las pérdidas por transmisión mecánica.Detalles

 sin bastidor rentables FM1")


¿Qué es un motor de articulación robótica con harmonic drive?
El motor de articulación armónica logra un control de movimiento de alta precisión mediante componentes integrados que incluyen harmonic drive, motor de par sin bastidor, freno, encoder y unidad de accionamiento, con tamaño y peso optimizados.El motor de articulación armónica de HONPINE ofrece opciones de configuración flexibles para satisfacer diversas necesidades de aplicación, incluidos encoders duales, STO (Safe Torque Off), frenos de retención y sensores de par integrados.

Selección de actuador de articulación robótica con Harmonic Drive
Para satisfacer las diversas demandas del mercado, los motores de articulación robótica con harmonic drive de HONPINE se dividen actualmente en tres series principales: HPJM, TCHL y HAG.
Esta guía proporciona una visión general inicial para ayudarle a seleccionar el actuador más adecuado para su aplicación en función de factores como el control de costos, el plazo de entrega y los requisitos básicos de rendimiento.
Para una selección detallada y soporte técnico, no dude en ponerse en contacto con nosotros para seguir conversando.
Características clave
Esta serie lleva más de 5 años en el mercado y ofrece una solución de articulación para robots humanoides totalmente desarrollada y madura. Integra un reductor armónico, driver, encoder y motor de par sin bastidor. Hay disponibles opciones de encoder dual y freno. Admite protocolos de comunicación CAN (propietario), CANopen y EtherCAT.
Ventajas clave
Diseño altamente compacto, que permite más espacio para la integración del sistema bajo requisitos de rendimiento equivalentes
Grasa opcional de baja temperatura, adecuada para entornos severos de hasta -40°C
Plazo de entrega promedio ≤ 4 semanas, lo que garantiza una sólida capacidad de producción
Aplicaciones
Ideal para proyectos que requieren un rendimiento estable y confiable, entrega rápida por lotes u operación en entornos de baja temperatura.
Notas
Esta serie no fue diseñada originalmente con sensores de par ni impermeabilización. La personalización está disponible si se requieren estas características, pero debe esperarse un costo adicional y un plazo de entrega más largo.
Características clave
Esta nueva serie, que se lanzará a finales de 2025, adopta un reductor armónico de desarrollo propio, lo que permite un mejor control de costos. Viene de serie con encoders duales (absoluto de una sola vuelta, resolución de 23-bit) y admite protocolos de comunicación CAN FD y EtherCAT. Las funciones opcionales incluyen freno y sensor de par. El mazo de terminales integrado admite tendido de cables a través de eje hueco y conexión en cascada de módulos.
Ventajas clave
Ventaja significativa en costos
Admite configuraciones de montaje frontal, lateral y trasero, ofreciendo alta flexibilidad estructural
El diseño del mazo facilita una integración sencilla del sistema
Aplicaciones
Ideal para proyectos sensibles al costo con altos requisitos de flexibilidad de instalación.
Notas
Actualmente, solo está disponible una relación de engranajes de 101. Se espera que la gama completa de relaciones de engranajes se lance en June de 2026. El plazo de entrega actual es de aproximadamente 6 semanas.
Características clave
Lanzada en 2026, esta nueva serie está equipada con funcionalidad STO (Safe Torque Off) para cumplir requisitos de seguridad específicos. Adopta reductores armónicos de marcas nacionales líderes, lo que garantiza una alta confiabilidad del producto. Admite protocolos de comunicación CANopen y EtherCAT, con freno y sensor de par opcionales.
Ventajas clave
Cumple estándares de seguridad más altos
Excelente rendimiento y calidad confiable de los componentes centrales del reductor
Aplicaciones
Ideal para proyectos con requisitos de seguridad claros o donde la confiabilidad del reductor es una prioridad máxima.
Notas
Como serie recién lanzada, la capacidad de producción aún está aumentando. El plazo de entrega actual es de aproximadamente 8–10 semanas.
Soluciones y aplicaciones de motores de articulación robótica
Durante muchos años, HONPINE ha aplicado motores de articulación robótica armónica y motores de articulación planetaria en diversos campos, incluidos robots humanoides, robots de doble brazo, robots con ruedas, drones, maquinaria agrícola, equipos nucleares, robots industriales y equipos de automatización industrial, proporcionando soluciones de motores de articulación y admitiendo personalización para estas industrias. Sus series HPJM, TCHL, HAG y otras series de motores de articulación robótica se desarrollan sobre la base de la experiencia obtenida en el servicio práctico.
‹







›

¿Cuáles son las ventajas y desventajas del motor de articulación armónica?
Ventajas de los motores de articulación armónica
Precisión ultraalta
Holgura de transmisión mínima con una precisión de posicionamiento repetitivo de hasta ±0.01 mm, lo que lo hace esencial para operaciones robóticas precisas.
Alta relación de reducción
Una gran relación de reducción de una sola etapa permite una alta salida de par a partir de un tamaño compacto, logrando un rendimiento eficaz de “baja velocidad, alta carga”.

Diseño extremadamente compacto
Estructura simple, tamaño pequeño y construcción ligera, lo que lo hace muy adecuado para partes robóticas con limitación de espacio, como muñecas y manos.
Alta capacidad de integración
A menudo se vende como módulos integrados que combinan motores, encoders y otros componentes, lo que permite una instalación y mantenimiento convenientes al tiempo que admite diseño modular.
Desventajas de los motores de articulación armónica
El reductor armónico y el sensor de par del motor de articulación armónica son desarrollados a medida, lo que dificulta reducir el precio. Sin embargo, en un futuro próximo, cuando la demanda y la capacidad de producción alcancen cierto nivel, el precio podrá reducirse.
Módulo de articulación robótica con Harmonic Drive - Preguntas frecuentes
Los motores de articulación DC armónica de HONPINE son actuadores armónicos diseñados específicamente para la inteligencia incorporada. hpjm fue el primer actuador armónico en lanzarse y actualmente cuenta con el rendimiento más estable y el tiempo de entrega más rápido. Para satisfacer las necesidades de los clientes, recientemente hemos lanzado dos nuevos motores de articulación DC armónica: TCHL y HAG. Contáctenos para obtener los folletos de productos más recientes.
Motor de articulación planetaria - Preguntas frecuentes
El motor de articulación planetaria JRM es un producto de grado militar de HONPINE, comúnmente utilizado en perros robóticos de alto rendimiento. Actualmente, para la biónica de robots humanoides, el motor de articulación armónica HPJM está a punto de lanzarse, con un diseño más compacto y una cavidad hueca más grande.
Actuadores de transmisión armónica para robots humanoides- Preguntas frecuentes
Estas son algunas de las preguntas técnicas y de compra más comunes que hacen los clientes al evaluar módulos de articulación y sistemas de actuadores para robots humanoides. Los temas incluyen selección de par, relaciones de reducción, control de movimiento, protocolos de comunicación, gestión térmica, rendimiento de caminata dinámica e integración con plataformas de robots humanoides.
Esta guía está destinada a ayudar a ingenieros, desarrolladores de robótica y equipos de compras a comprender mejor cómo seleccionar soluciones de articulación adecuadas para diferentes tamaños de robots humanoides, requisitos de carga útil y escenarios de aplicación.
Para más soluciones de robots humanoides, póngase en contacto con honpine
Precauciones para el uso de módulos de articulación robótica
Para obtener más información sobre asuntos de preventa y posventa relacionados con los módulos de articulación, póngase en contacto con nosotros. HONPINE proporcionará soporte técnico individual.
● Operación segura:No conecte ni desconecte cables mientras el equipo esté encendido. Antes de desconectar los condensadores, asegúrese de que estén completamente descargados.
● Instalación del equipo: Confirme que la estructura de instalación tenga suficiente resistencia mecánica para soportar el peso de la articulación integrada y garantizar un montaje seguro.
● Apriete de tornillos: Cuando apriete tornillos entre el motor y los componentes estructurales, se deben utilizar adhesivo fijador de roscas y una llave dinamométrica. Siga estrictamente las especificaciones de par proporcionadas en el manual del motor.
● Normas de cableado: Realice el cableado estrictamente de acuerdo con la definición de pines. No se base en los colores de los cables para la identificación, y asegúrese de que la adaptación de resistencia sea correcta.
● Uso de la fuente de alimentación: Verifique que el voltaje de la fuente de alimentación coincida con el voltaje nominal de la articulación integrada. Cuando los usuarios conectan baterías externas de litio, si el voltaje nominal es 48V, el voltaje de la batería completamente cargada puede superar 60V durante el arranque, lo que podría afectar el funcionamiento del motor o incluso dañarlo. Las medidas preventivas incluyen la instalación de condensadores electrolíticos para suavizar el voltaje o la conexión en serie de un módulo regulador de voltaje con la entrada de alimentación del motor para estabilizar el voltaje de suministro.
● Sistemas de alimentación por batería: En los sistemas alimentados por batería, la propia batería puede absorber la corriente inversa y ayudar a evitar que el voltaje supere el límite nominal.
● Sistemas de alimentación conmutada: En los sistemas de alimentación conmutada, el motor integrado puede generar energía regenerativa durante una desaceleración rápida o cuando es accionado por cargas gravitacionales, provocando que el voltaje del bus de CC aumente y potencialmente active alarmas de sobretensión. Para evitarlo, se recomienda instalar condensadores electrolíticos de gran capacidad en paralelo o añadir resistencias de frenado para reducir los picos de voltaje.
● Evite descargas eléctricas y lesiones por aplastamiento: Cuando el motor esté encendido, en funcionamiento o conectado a componentes estructurales, nunca toque el motor directamente con la mano para evitar descargas eléctricas o lesiones por aplastamiento causadas por estructuras en movimiento.
● Desmontaje del motor: Está prohibido desmontar el motor sin autorización. El desmontaje solo está permitido en circunstancias especiales, tras consulta y bajo orientación profesional. El desmontaje no autorizado anulará la garantía.
● Transporte después del desmontaje: Si el motor se desmonta bajo orientación y necesita ser devuelto, asegúrese de que todos los tornillos originales estén correctamente reinstalados y asegurados antes del envío para evitar daños durante el transporte causados por vibración o impacto, incluidos los tornillos del reductor, los tornillos de la tapa trasera y otros componentes de fijación.
Tendencias de la industria
- 00
0000-00
¿Qué es un actuador de articulación robótica?¿Cómo elegir el mejor actuador rotativo para articulaciones robóticas?
- 00
0000-00
Wiki de Tecnología de Transmisión de Accionamiento Armónico
- 00
0000-00
El actuador rotatorio armónico ayuda a implementar la primera estación de carga móvil aérea inteligente para vehículos eléctricos de CC con cambio de vía del mundo
- 00
0000-00
Reductores RV de alta precisión perfectamente adaptados para robots caminantes
- 00
0000-00
Accionamiento Armónico Ultracompacto – Fabricación de Precisión con Materiales de Alta Gama





Tendencias de la industria
- 00
0000-00
¿Qué es un actuador de articulación robótica?¿Cómo elegir el mejor actuador rotativo para articulaciones robóticas?
- 00
0000-00
Wiki de Tecnología de Transmisión de Accionamiento Armónico
- 00
0000-00
El actuador rotatorio armónico ayuda a implementar la primera estación de carga móvil aérea inteligente para vehículos eléctricos de CC con cambio de vía del mundo
- 00
0000-00
Reductores RV de alta precisión perfectamente adaptados para robots caminantes
- 00
0000-00
Accionamiento Armónico Ultracompacto – Fabricación de Precisión con Materiales de Alta Gama
